产品简介
AOP(Agent-Oriented-Programming,面向智能体编程) 是网易伏羲设计的一套全新的编程范式,接近自然语言编程、快捷定义任务,其核心价值在于为开发者对接智能体(拥有AI和人的能力)提供了统一范式的接口和服务,并自动构建数据闭环让智能体具备自主进化能力。
开发者可通过 AOP 使用伏羲有灵平台预置的公共智能体能力(包括 ChatGPT、Midjourney 等预训练模型,以及数据标注、美术制作、工程机械操控等众包能力),也可针对行业细分场景定制化构建智能体应用。
产品架构
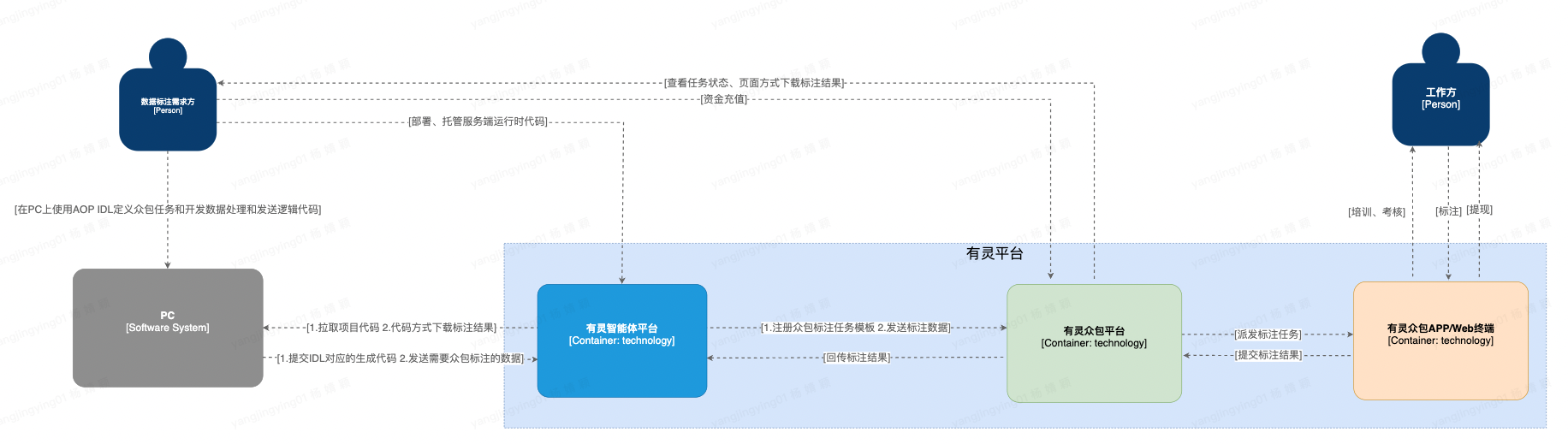
数据标注需求方:有数据标注需求的个人或组织。
工作方:C端散户或者工会人员,在有灵众包 APP/Web 端完成数据标注题目。
PC: 用户本地开发环境,需安装vscode、AOP SDK、git等软件工具。
有灵平台:虚实结合的人机协作任务平台,支持用户面向智能体快速建模、发布和运营各类可由人机协作完成的任务。包含有灵智能体平台、有灵众包平台等子产品。
有灵智能体平台:提供 Agent 智能体生命周期管理的平台。支持搭建众包标注页面,提供数据自动持久化、账号权限管理等机制。
有灵众包平台:众包任务管理平台,集成领先的自动质检、用户画像等算法,提供资金管理、积分结算、用户培训等功能模块。
有灵众包 APP/Web 端:工作方(C端散户或工会)完成数据标注的操作终端。
基本概念
AOP SDK:AOP 提供的 SDK ,需要在本地开发环境进行安装。包括了 SDK 主体、 ACE 引擎等依赖。
IDL: AOP使用 IDL (接口描述语言)描述任务要素,要素包括数据结构类型、任务目标、环境、智能体基本要素和各项能力等。IDL 需要通过 AOP SDK 生成任务、智能体的运行代码。
Task:任务,对应自然语言理解的任务。如到达某地、完成某项工作,都可以被理解为完成任务。
Agent:智能体。一个任务可以由一个或多个智能体完成,智能体可以是人或者机器。每个智能体具备多个能力(Capability)。
项目:有灵平台提供的工作空间,由项目创建者进行管理,其他成员协同开发。目前,一个项目支持一个 Task。
可视化开发:有灵平台项目下提供的可视化开发功能,可视化编辑众包标注任务、智能体。
私服:个人私服关联个人代码分支,作为开发、测试环境。
主干:默认服务器关联主干代码分支,作为线上环境。
题目:需要标注的数据将以题目的形式发送到有灵众包平台 APP/Web 端,供工作方做题。